🛠️ Anleitung: Linienfolger
🎯 Ziel:
Der mBot 2 soll einer schwarzen Linie auf hellem Untergrund folgen – mithilfe der linken und rechten RGB-Sensoren.
Anweisung anzeigen
📦 Vorbereitung:
- Der mBot 2 ist aufgebaut und eingeschaltet.
- mBlock ist geöffnet.
- Der mBot 2 ist mit dem PC verbunden (USB oder Bluetooth).
- Gerät: CyberPi + mBot2 Shield
- Erweiterung: Quad-RGB-Sensor
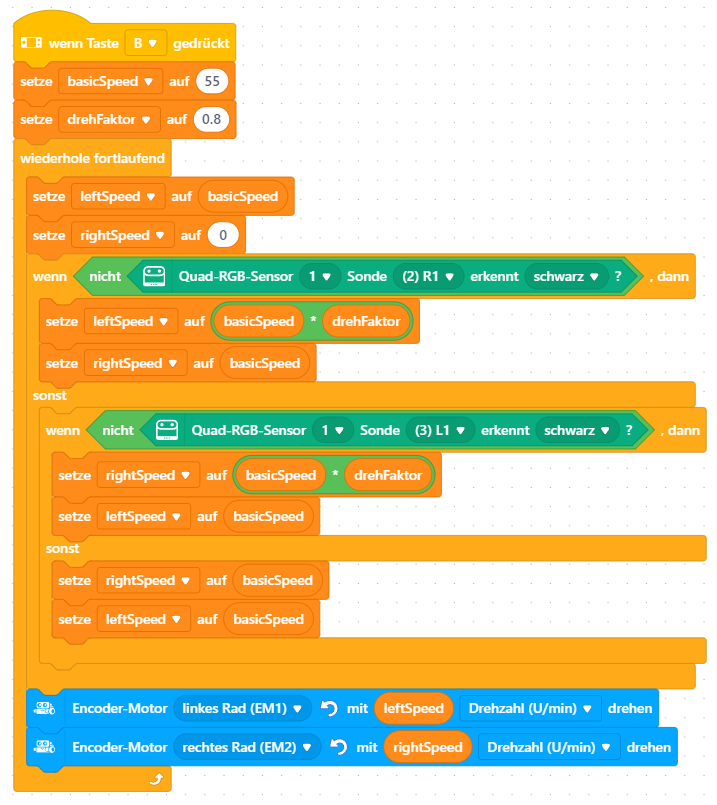
🧱 1. Starte dein Programm bei Tastendruck
- Wähle den Block:
🟨Wenn Taste B gedrückt wird - Setze zwei Variablen:
basicSpeed→ z. B. auf 55drehFaktor→ z. B. auf 0.8
🔁 2. Wiederhole dein Programm ständig
- Ziehe den Block:
🟨wiederhole fortlaufend
⚙️ 3. Lege Anfangswerte für die Geschwindigkeit fest
- Setze
leftSpeedaufbasicSpeed - Setze
rightSpeedauf0
👁️ 4. Reagiere auf die Sensoren
Wenn der rechte Sensor nicht schwarz sieht:
- Verringere die Geschwindigkeit links →
leftSpeed = basicSpeed * drehFaktor - Rechts bleibt auf
basicSpeed
Sonst, wenn der linke Sensor nicht schwarz sieht:
- Verringere die Geschwindigkeit rechts →
rightSpeed = basicSpeed * drehFaktor - Links bleibt auf
basicSpeed
Sonst (beide Sensoren sehen schwarz):
- Beide Geschwindigkeiten auf
basicSpeed
🧩 5. Steuere die Motoren
- Setze
linkes Rad (EM1)aufleftSpeed - Setze
rechtes Rad (EM2)aufrightSpeed
🧪 6. Teste deinen Roboter
- Platziere den mBot auf einer schwarzen Linie auf hellem Untergrund
- Drücke die Taste B auf dem CyberPi
- Der Roboter sollte der Linie folgen und sanft lenken, wenn er abweicht
✅ Tipps:
Ist die Linie zu dünn oder nicht schwarz genug?
Drehfaktor (0.8) kannst du testen und anpassen → kleiner = stärkeres Lenken
Funktioniert am besten mit deutlich sichtbarer schwarzer Linie
Wenn er sich seltsam verhält, prüfe:
Sind die Sensoren zu weit vom Boden entfernt?
Blöcke anzeigen
Programm herunterladen